Share
Pin
Tweet
Send
Share
Send
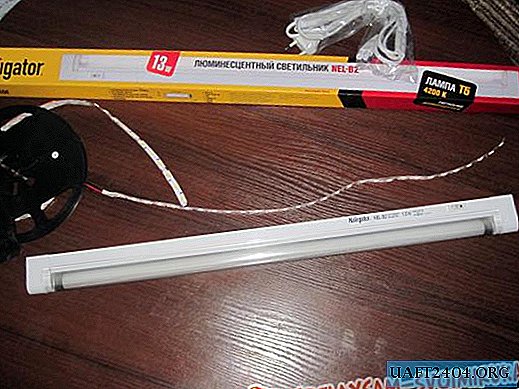
-1.5ボルトの小型モーター2個(古いおもちゃから購入または取り外し可能)(写真を参照)
-小さなペーパークリップ2個
-2つの大きなペーパークリップ
-2つのAAAまたはAAバッテリー
-AAAまたはAAバッテリー用ホルダー1個(おもちゃから購入または取り外し可能)
-1 2 cmの断熱材
-1個の木製ボール(車輪として使用)(他のスタビライザーを使用できます。たとえば、古いおもちゃや不要なおもちゃから車輪を取り外すことができます) -1メートル電気ワイヤー
-2つの小さなSPDTスイッチ(たとえば、古いコンピューターのマウスから購入または削除できます)
ツールと同様に:
*はんだごて+少しの錫
*接着剤銃と接着剤スティック(接着剤スティックははんだごてで簡単に溶かすことができますが、接着剤銃でこれを行うことをお勧めします)
*ニッパー(断熱材を除去するため)
そして、ここにすべての詳細があります

組立:
1.メールモード6cmの13個のワイヤーを敷き、1cmの絶縁体(両側)を取り外します。

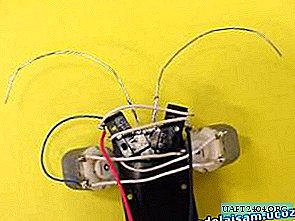
2.ワイヤを各コンポーネント(バッテリーを除く)にはんだ付けします。図を参照してください。

ワイヤーをバーツにはんだ付けします。ホルダー(青)(3番目の接続)

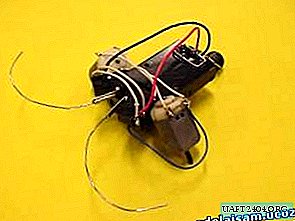
3.バッテリーホルダーを裏返し、スイッチを「V字型」に貼り付けます(写真を参照)

4.モーターのシャーシが地面に触れるように、スイッチ間にモーター2を接着します。



5.大きなペーパークリップとボールからスタビライザー(表面上での移動を容易にするホイール)を作成します。

6.接続

これはどのように見えるべきかです


7. 2マルを飲む。ペーパークリップとバグから彼らのために口ひげを作る

8.口ひげをスイッチに慎重に接着します(スイッチ自体を接着しないように、このために少し接着剤を使用します)
9.モーターの下部構造に小さな断熱材を巻き付けます(グリップを向上させるため)

10.バッテリーを挿入します
完了!)
それほど難しくありません。それ自体は最近やった!!!
トリックは、彼が右のアンテナで障害物に触れると、彼の車輪が停止し、彼が左に向きを変えることです。 (障害物を回避する)
Share
Pin
Tweet
Send
Share
Send